شركات الروبوتات تنظر إلى ما هو أبعد من الرؤية الخام نحو فهم مكاني أعمق
توسّع Brain Corp وجامعة كاليفورنيا في سان دييغو تعاونهما البحثي لتحسين كيفية فهم الروبوتات الذاتية للبيئات المعقدة. ويركز العمل على الخرائط الدلالية وما يصفه الشريكان بأنه “طبقة ترسيخ سياقي”، وهي تمثيل رقمي للأماكن المادية يهدف إلى مساعدة الروبوتات على تفسير ما يحيط بها بصورة أكثر موثوقية في البيئات التجارية والصناعية.
يأتي هذا الإعلان في وقت يتسابق فيه مطورو الروبوتات لدمج أنظمة الرؤية-اللغة-الفعل وغيرها من أنظمة الذكاء الاصطناعي التوليدي في آلات من العالم الحقيقي. وقد وسّعت هذه النماذج ما يمكن للروبوتات استنتاجه من الصور واللغة، لكن السؤال الجوهري هو ما إذا كانت قادرة على فعل ذلك بدرجة كافية من الاتساق والمرونة للنشر في بيئات مزدحمة وغير متوقعة.
لماذا ترى Brain Corp وجامعة كاليفورنيا في سان دييغو أن الخرائط لا تزال مهمة
بحسب المصدر المقدم، تتبنى هذه الشراكة موقفًا مفاده أن الخرائط الدلالية السياقية ثلاثية الأبعاد تظل أساسية حتى مع استكشاف الصناعة لأنظمة ذكاء اصطناعي تعمل بشكل أكثر مباشرة من البيانات المرئية. وبعبارة أخرى، فإن الإدراك الأغنى لا يلغي الحاجة إلى فهم مكاني منظم، بل قد يجعل هذه الحاجة أكثر إلحاحًا.
هذا موقف مهم في مجال يزداد حماسًا للذكاء الاصطناعي من طرف إلى طرف. وإذا كانت الشراكة على حق، فإن الطريق إلى الاستقلالية العملية لن يعتمد فقط على نماذج أكبر، بل أيضًا على نماذج عالمية متينة تخبر الآلات بماهية الأشياء، وأين تقع، وكيف ترتبط بالمهام التي يحاول الروبوت تنفيذها.
من SLAM إلى الوعي الظرفي
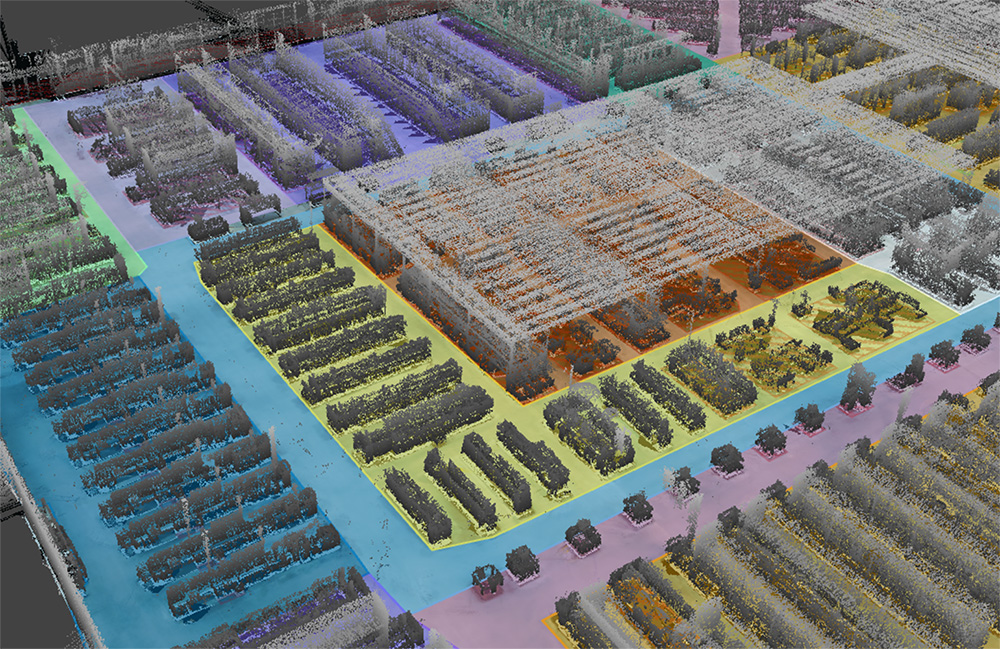
ساعدت تقنيات التوطين ورسم الخرائط المتزامنين، أو SLAM، الروبوتات على الانتقال من الخلايا الصناعية الثابتة إلى المساحات الديناميكية عبر تمكينها من بناء الخرائط وتحديثها أثناء التنقل. والخطوة التالية، كما يصوغها الشريكان، هي منح تلك الخرائط عمقًا دلاليًا وسياقيًا أكبر. وهذا يعني الانتقال من الهندسة إلى الفهم: ليس مجرد ممر، بل ممر فيه أشخاص وعوائق وسير عمل وقواعد تشغيل متغيرة.
يصف المصدر طبقة الترسيخ السياقي بأنها تمثيل رقمي ذكي يمكن أن يدعم الروبوتات والطائرات المسيّرة والمركبات ذاتية القيادة. والعائد الموعود هو وعي ظرفي قوي بما يكفي لتمكين أنظمة الذكاء الاصطناعي المتقدمة من الاستجابة بصورة حدسية وآمنة في البيئات المادية المشتركة مع البشر.
المشكلة التجارية وراء البحث
تكمن جاذبية هذا الاتجاه في عمليته. فكثير من إخفاقات الروبوتات لا تحدث لأن النظام لا يستطيع التعرف على جسم في المختبر، بل لأن الأماكن الواقعية فوضوية وقابلة لإعادة التشكيل ومعقدة اجتماعيًا. تتحرك الأرفف، وتظهر العربات، ويقاطع الأشخاص التدفقات، وتتغير ظروف الإضاءة. والروبوت الذي يستطيع تصنيف الصور لكنه لا يستطيع ربط هذه المعلومات بسياق مكاني مستمر يصعب الوثوق به.
يمنح الحضور التشغيلي لـ Brain Corp المشروع خلفية واقعية للنشر. ويذكر المصدر أن الشركة نشرت أكثر من 50,000 روبوت حول العالم، ما يعني أنها تعمل انطلاقًا من قاعدة مثبتة بالفعل وليس من نماذج أولية بحثية فقط. وهذا مهم لأنه يشير إلى أن الشراكة تستهدف استقلالية ذات صلة تجاريًا، لا مجرد المقارنة الأكاديمية.
مسار وسطي للذكاء الاصطناعي المادي
تعكس هذه الشراكة أيضًا تحولًا أوسع في استراتيجية الروبوتات. فالصناعة تبحث بشكل متزايد عن مسار وسطي بين الأتمتة الهشة الخاصة بمهمة محددة وبين الذكاء الاصطناعي العام الطموح أكثر من اللازم. وتُعدّ الخرائط السياقية أحد المرشحين لهذه الطبقة الوسطى. فهي يمكن أن تحافظ على البنية والسلامة مع السماح في الوقت نفسه بسلوك أكثر مرونة في الأعلى.
وسيظل هذا النهج أساسيًا أو لا، بحسب التنفيذ، ولا سيما مدى قدرة هذه الخرائط الأغنى على التوسع والتحديث والاندماج مع نماذج الذكاء الاصطناعي سريعة التطور. لكن الفكرة الجوهرية سليمة: في الروبوتات، لا يقتصر الذكاء على الرؤية، بل يتمثل أيضًا في ترسيخ الإدراك ضمن نموذج مستقر للعالم. وتراهن Brain Corp وجامعة كاليفورنيا في سان دييغو على أن هذه الطبقة، وليس حجم النموذج وحده، قد تكون ما يجعل الجيل التالي من الأنظمة الذاتية قابلًا للنشر خارج البيئات الخاضعة للتحكم.
هذه المقالة مبنية على تقرير من The Robot Report. اقرأ المقال الأصلي.
Originally published on therobotreport.com